Seitz, S. M., Curless, B., Diebel, J., Scharstein, D., and Szeliski, R.
2006. A Comparison and Evaluation of Multi-View Stereo Reconstruction
Algorithms. In Proceedings of the 2006 IEEE Computer Society Conference on Computer Vision and Pattern Recognition - Volume 1 (June 17 - 22, 2006). CVPR. IEEE Computer Society, Washington, DC, 519-528. DOI= http://dx.doi.org/10.1109/CVPR.2006.19
내가 설치할 컴퓨터 사양:
Model Name: Mac mini
Model Identifier: Macmini3,1
Processor Name: Intel Core 2 Duo
Processor Speed: 2 GHz
Number Of Processors: 1
Total Number Of Cores: 2
L2 Cache: 3 MB
Memory: 1 GB
Bus Speed: 1.07 GHz
Boot ROM Version: MM31.0081.B00
그래픽 카드:
NVIDIA GeForce 9400
"Intel Core 2 Duo processors 2.4GHz+ are fine."이라고 했는데, 2.0이면 되지 않을까? 그래픽 카드는 동일한 것이니 문제 없고.
1. library dependency 확인
1. TooN - a header library for linear algebra
2. libCVD - a library for image handling, video capture and computer vision
3. Gvars3 - a run-time configuration/scripting library, this is a sub-project of libCVD.
%% cvs -z3 -d:pserver:anonymous@cvs.savannah.nongnu.org:/sources/toon co TooN
실행 결과:
cvs checkout: warning: failed to open /Users/lym/.cvspass for reading: No such file or directory
cvs checkout: Updating TooN
U TooN/Authors
U TooN/COPYING
U TooN/Cholesky.h
U TooN/Doxyfile
U TooN/GPL.txt
U TooN/LU.h
U TooN/Lapack_Cholesky.h
U TooN/Makefile.in
U TooN/README
U TooN/SVD.h
U TooN/SymEigen.h
U TooN/TODO
U TooN/TooN.h
U TooN/configure
U TooN/configure.ac
U TooN/determinant.h
U TooN/gauss_jordan.h
U TooN/gaussian_elimination.h
U TooN/generated.h
U TooN/helpers.h
U TooN/irls.h
U TooN/lapack.h
U TooN/make_make_vector.awk
U TooN/make_typeof.awk
U TooN/se2.h
U TooN/se3.h
U TooN/sl.h
U TooN/so2.h
U TooN/so3.h
U TooN/wls.h
cvs checkout: Updating TooN/Documentation
cvs checkout: Updating TooN/benchmark
U TooN/benchmark/generate_solvers.m
U TooN/benchmark/solve_ax_equals_b.cc
U TooN/benchmark/solvers.cc
cvs checkout: Updating TooN/doc
U TooN/doc/COPYING_FDL
U TooN/doc/Makefile
U TooN/doc/documentation.h
U TooN/doc/linoperatorsdoc.h
cvs checkout: Updating TooN/internal
U TooN/internal/allocator.hh
U TooN/internal/builtin_typeof.h
U TooN/internal/comma.hh
U TooN/internal/config.hh
U TooN/internal/config.hh.in
U TooN/internal/dchecktest.hh
U TooN/internal/debug.hh
U TooN/internal/deprecated.hh
U TooN/internal/diagmatrix.h
U TooN/internal/make_vector.hh
U TooN/internal/matrix.hh
U TooN/internal/mbase.hh
U TooN/internal/objects.h
U TooN/internal/operators.hh
U TooN/internal/overfill_error.hh
U TooN/internal/reference.hh
U TooN/internal/size_mismatch.hh
U TooN/internal/slice_error.hh
U TooN/internal/typeof.hh
U TooN/internal/vbase.hh
U TooN/internal/vector.hh
cvs checkout: Updating TooN/optimization
U TooN/optimization/brent.h
U TooN/optimization/conjugate_gradient.h
U TooN/optimization/downhill_simplex.h
U TooN/optimization/golden_section.h
cvs checkout: Updating TooN/test
U TooN/test/SXX_test.cc
U TooN/test/as_foo.cc
U TooN/test/brent_test.cc
U TooN/test/cg_test.cc
U TooN/test/cg_view.gnuplot
U TooN/test/chol.cc
U TooN/test/diagslice.cc
U TooN/test/dynamic_test.cc
U TooN/test/gauss_jordan.cc
U TooN/test/gaussian_elimination_test.cc
U TooN/test/golden_test.cc
U TooN/test/identity_test.cc
U TooN/test/lutest.cc
U TooN/test/make_vector.cc
U TooN/test/makevector.cc
U TooN/test/mat_test.cc
U TooN/test/mat_test2.cc
U TooN/test/mmult_test.cc
U TooN/test/normalize_test.cc
U TooN/test/normalize_test2.cc
U TooN/test/scalars.cc
U TooN/test/simplex_test.cc
U TooN/test/simplex_view.gnuplot
U TooN/test/sl.cc
U TooN/test/svd_test.cc
U TooN/test/sym.cc
U TooN/test/test2.cc
U TooN/test/test3.cc
U TooN/test/test_foreign.cc
U TooN/test/un_project.cc
U TooN/test/vec_test.cc
생성된 TooN 폴더에 들어가서
%%% ./configure
실행 결과:
checking for g++... g++
checking for C++ compiler default output file name... a.out
checking whether the C++ compiler works... yes
checking whether we are cross compiling... no
checking for suffix of executables...
checking for suffix of object files... o
checking whether we are using the GNU C++ compiler... yes
checking whether g++ accepts -g... yes
checking for dgesvd_ in -llapack... yes
checking for decltype... no
checking for __typeof__... yes
checking for __attribute__((deprecated))... yes
You're on the development branch of TooN 2.0. Everything will probably work, but
the interface is a bit different from TooN-1.x
If you want TooN-1, then get it using:
cvs -z3 -d:pserver:anoncvs@cvs.savannah.nongnu.org:/cvsroot/toon co -r Maintenance_Branch_1_x TooN
or update what you currently have using:
cvs up -r Maintenance_Branch_1_x
or head over to:
http://mi.eng.cam.ac.uk/~er258/cvd/
Otherwise, please report any bugs you come across.
%% cvs -z3 -d:pserver:anonymous@cvs.savannah.nongnu.org:/sources/toon co -D "Mon May 11 16:29:26 BST 2009" TooN
실행 결과:
cvs checkout: warning: failed to open /Users/lym/.cvspass for reading: No such file or directory
? TooN/Makefile
? TooN/config.log
? TooN/config.status
cvs checkout: Updating TooN
U TooN/Cholesky.h
U TooN/Doxyfile
U TooN/LU.h
U TooN/Makefile.in
U TooN/SVD.h
U TooN/SymEigen.h
U TooN/TooN.h
U TooN/configure
U TooN/configure.ac
cvs checkout: `TooN/determinant.h' is no longer in the repository
U TooN/gauss_jordan.h
U TooN/gaussian_elimination.h
U TooN/helpers.h
U TooN/irls.h
U TooN/se2.h
U TooN/se3.h
U TooN/sl.h
U TooN/so2.h
U TooN/so3.h
U TooN/util.h
U TooN/wls.h
cvs checkout: Updating TooN/Documentation
cvs checkout: Updating TooN/benchmark
U TooN/benchmark/generate_solvers.m
cvs checkout: Updating TooN/doc
U TooN/doc/documentation.h
U TooN/doc/matrixdoc.h
cvs checkout: Updating TooN/internal
U TooN/internal/allocator.hh
cvs checkout: `TooN/internal/comma.hh' is no longer in the repository
RCS file: /sources/toon/TooN/internal/config.hh,v
retrieving revision 1.12
retrieving revision 1.8
Merging differences between 1.12 and 1.8 into config.hh
TooN/internal/config.hh already contains the differences between 1.12 and 1.8
U TooN/internal/config.hh.in
cvs checkout: `TooN/internal/dchecktest.hh' is no longer in the repository
U TooN/internal/debug.hh
cvs checkout: `TooN/internal/deprecated.hh' is no longer in the repository
U TooN/internal/diagmatrix.h
U TooN/internal/matrix.hh
U TooN/internal/mbase.hh
U TooN/internal/objects.h
U TooN/internal/operators.hh
cvs checkout: `TooN/internal/overfill_error.hh' is no longer in the repository
U TooN/internal/reference.hh
U TooN/internal/slice_error.hh
U TooN/internal/vector.hh
cvs checkout: Updating TooN/optimization
U TooN/optimization/conjugate_gradient.h
U TooN/optimization/downhill_simplex.h
U TooN/optimization/golden_section.h
cvs checkout: Updating TooN/test
U TooN/test/identity_test.cc
cvs checkout: `TooN/test/simplex_test.cc' is no longer in the repository
cvs checkout: `TooN/test/simplex_view.gnuplot' is no longer in the repository
U TooN/test/vec_test.cc
%% cvs -z3 -d:pserver:anonymous@cvs.savannah.nongnu.org:/sources/libcvd co -D "Mon May 11 16:29:26 BST 2009" libcvd
실행 결과:
cvs checkout: warning: failed to open /Users/lym/.cvspass for reading: No such file or directory
cvs checkout: Updating libcvd
U libcvd/Authors
U libcvd/Doxyfile
U libcvd/LICENSE
U libcvd/Makefile.in
U libcvd/TODO
U libcvd/config.guess
U libcvd/config.sub
U libcvd/configure
U libcvd/configure.in
U libcvd/generate_dependencies.bash
U libcvd/install-sh
U libcvd/subimage_test.cc
cvs checkout: Updating libcvd/build
cvs checkout: Updating libcvd/build/vc2005
U libcvd/build/vc2005/config.h
U libcvd/build/vc2005/libcvd.sln
U libcvd/build/vc2005/libcvd.vcproj
cvs checkout: Updating libcvd/build/vc2008
U libcvd/build/vc2008/libcvd.sln
U libcvd/build/vc2008/libcvd.vcproj
cvs checkout: Updating libcvd/cvd
U libcvd/cvd/abs.h
U libcvd/cvd/bresenham.h
U libcvd/cvd/brezenham.h
U libcvd/cvd/byte.h
U libcvd/cvd/camera.h
U libcvd/cvd/colourspace.h
U libcvd/cvd/colourspace_convert.h
U libcvd/cvd/colourspace_frame.h
U libcvd/cvd/colourspacebuffer.h
U libcvd/cvd/colourspaces.h
U libcvd/cvd/connected_components.h
U libcvd/cvd/convolution.h
U libcvd/cvd/cpu_hacks.h
U libcvd/cvd/cvd_image.h
U libcvd/cvd/cvd_timer.h
U libcvd/cvd/deinterlacebuffer.h
U libcvd/cvd/deinterlaceframe.h
U libcvd/cvd/diskbuffer2.h
U libcvd/cvd/diskbuffer2_frame.h
U libcvd/cvd/documentation.h
U libcvd/cvd/draw.h
U libcvd/cvd/eventobject.h
U libcvd/cvd/exceptions.h
U libcvd/cvd/fast_corner.h
U libcvd/cvd/gl_helpers.h
U libcvd/cvd/glwindow.h
U libcvd/cvd/haar.h
U libcvd/cvd/harris_corner.h
U libcvd/cvd/helpers.h
U libcvd/cvd/image.h
U libcvd/cvd/image_convert.h
U libcvd/cvd/image_convert_fwd.h
U libcvd/cvd/image_interpolate.h
U libcvd/cvd/image_io.h
U libcvd/cvd/image_ref.h
U libcvd/cvd/integral_image.h
U libcvd/cvd/interpolate.h
U libcvd/cvd/irls.h
U libcvd/cvd/la.h
U libcvd/cvd/localvideobuffer.h
U libcvd/cvd/localvideoframe.h
U libcvd/cvd/message_queue.h
U libcvd/cvd/nonmax_suppression.h
U libcvd/cvd/random.h
U libcvd/cvd/readaheadvideobuffer.h
U libcvd/cvd/rgb.h
U libcvd/cvd/rgb8.h
U libcvd/cvd/rgba.h
U libcvd/cvd/ringbuffer.h
U libcvd/cvd/runnable.h
U libcvd/cvd/runnable_batch.h
U libcvd/cvd/se2.h
U libcvd/cvd/se3.h
U libcvd/cvd/serverpushjpegbuffer.h
U libcvd/cvd/serverpushjpegframe.h
U libcvd/cvd/so2.h
U libcvd/cvd/so3.h
U libcvd/cvd/synchronized.h
U libcvd/cvd/tensor_voting.h
U libcvd/cvd/thread.h
U libcvd/cvd/timeddiskbuffer.h
U libcvd/cvd/timer.h
U libcvd/cvd/utility.h
U libcvd/cvd/vector_image_ref.h
U libcvd/cvd/videobuffer.h
U libcvd/cvd/videobufferflags.h
U libcvd/cvd/videodisplay.h
U libcvd/cvd/videofilebuffer.h
U libcvd/cvd/videofilebuffer_frame.h
U libcvd/cvd/videoframe.h
U libcvd/cvd/videosource.h
U libcvd/cvd/vision.h
U libcvd/cvd/wls.h
U libcvd/cvd/wls_c.h
U libcvd/cvd/wls_cholesky.h
U libcvd/cvd/yc.h
cvs checkout: Updating libcvd/cvd/IRIX
U libcvd/cvd/IRIX/O2buffer.h
U libcvd/cvd/IRIX/O2videoframe.h
U libcvd/cvd/IRIX/sgi-video.h
cvs checkout: Updating libcvd/cvd/Linux
U libcvd/cvd/Linux/capture_logic.cxx
U libcvd/cvd/Linux/dvbuffer.h
U libcvd/cvd/Linux/dvbuffer3.h
U libcvd/cvd/Linux/dvframe.h
U libcvd/cvd/Linux/v4l1buffer.h
U libcvd/cvd/Linux/v4l1frame.h
U libcvd/cvd/Linux/v4l2buffer.h
U libcvd/cvd/Linux/v4l2frame.h
U libcvd/cvd/Linux/v4lbuffer.h
U libcvd/cvd/Linux/v4lcontrol.h
cvs checkout: Updating libcvd/cvd/OSX
U libcvd/cvd/OSX/qtbuffer.h
U libcvd/cvd/OSX/qtframe.h
cvs checkout: Updating libcvd/cvd/internal
U libcvd/cvd/internal/aligned_mem.h
U libcvd/cvd/internal/assembly.h
U libcvd/cvd/internal/builtin_components.h
U libcvd/cvd/internal/convert_pixel_types.h
U libcvd/cvd/internal/disk_image.h
U libcvd/cvd/internal/gl_types.h
U libcvd/cvd/internal/image_ref_implementation.hh
U libcvd/cvd/internal/is_pod.h
U libcvd/cvd/internal/load_and_save.h
U libcvd/cvd/internal/name_CVD_rgb_types.h
U libcvd/cvd/internal/name_builtin_types.h
U libcvd/cvd/internal/pixel_operations.h
U libcvd/cvd/internal/pixel_traits.h
U libcvd/cvd/internal/rgb_components.h
U libcvd/cvd/internal/scalar_convert.h
U libcvd/cvd/internal/simple_vector.h
cvs checkout: Updating libcvd/cvd/internal/io
U libcvd/cvd/internal/io/bmp.h
U libcvd/cvd/internal/io/fits.h
U libcvd/cvd/internal/io/jpeg.h
U libcvd/cvd/internal/io/png.h
U libcvd/cvd/internal/io/pnm_grok.h
U libcvd/cvd/internal/io/save_postscript.h
U libcvd/cvd/internal/io/text.h
U libcvd/cvd/internal/io/tiff.h
cvs checkout: Updating libcvd/cvd/internal/pnm
cvs checkout: Updating libcvd/cvd/lock
cvs checkout: Updating libcvd/cvd/python
U libcvd/cvd/python/interface.h
U libcvd/cvd/python/selector.h
U libcvd/cvd/python/types.h
cvs checkout: Updating libcvd/cvd_src
U libcvd/cvd_src/bayer.cxx
U libcvd/cvd_src/brezenham.cc
U libcvd/cvd_src/colourspace_convert.cxx
U libcvd/cvd_src/connected_components.cc
U libcvd/cvd_src/convolution.cc
U libcvd/cvd_src/corner_10.h
U libcvd/cvd_src/corner_12.h
U libcvd/cvd_src/corner_9.h
U libcvd/cvd_src/cvd_timer.cc
U libcvd/cvd_src/deinterlacebuffer.cc
U libcvd/cvd_src/diskbuffer2.cc
U libcvd/cvd_src/draw.cc
U libcvd/cvd_src/draw_toon.cc
U libcvd/cvd_src/eventobject.cpp
U libcvd/cvd_src/exceptions.cc
U libcvd/cvd_src/fast_corner.cxx
U libcvd/cvd_src/fast_corner_9_nonmax.cxx
U libcvd/cvd_src/faster_corner_10.cxx
U libcvd/cvd_src/faster_corner_12.cxx
U libcvd/cvd_src/faster_corner_9.cxx
U libcvd/cvd_src/faster_corner_utilities.h
U libcvd/cvd_src/globlist.cxx
U libcvd/cvd_src/gltext.cpp
U libcvd/cvd_src/glwindow.cc
U libcvd/cvd_src/half_sample.cc
U libcvd/cvd_src/image_io.cc
U libcvd/cvd_src/mono.h
U libcvd/cvd_src/nonmax_suppression.cxx
U libcvd/cvd_src/sans.h
U libcvd/cvd_src/serif.h
U libcvd/cvd_src/slower_corner_10.cxx
U libcvd/cvd_src/slower_corner_11.cxx
U libcvd/cvd_src/slower_corner_12.cxx
U libcvd/cvd_src/slower_corner_7.cxx
U libcvd/cvd_src/slower_corner_8.cxx
U libcvd/cvd_src/slower_corner_9.cxx
U libcvd/cvd_src/synchronized.cpp
U libcvd/cvd_src/tensor_voting.cc
U libcvd/cvd_src/thread.cpp
U libcvd/cvd_src/timeddiskbuffer.cc
U libcvd/cvd_src/utility_helpers.h
U libcvd/cvd_src/videodisplay.cc
U libcvd/cvd_src/videofilebuffer.cc
U libcvd/cvd_src/videosource.cpp
U libcvd/cvd_src/yuv411_to_stuff.cxx
U libcvd/cvd_src/yuv420.cpp
U libcvd/cvd_src/yuv422.cpp
U libcvd/cvd_src/yuv422.h
cvs checkout: Updating libcvd/cvd_src/IRIX
U libcvd/cvd_src/IRIX/O2buffer.cxx
U libcvd/cvd_src/IRIX/sgi-video.cxx
cvs checkout: Updating libcvd/cvd_src/Linux
U libcvd/cvd_src/Linux/dvbuffer.cc
U libcvd/cvd_src/Linux/dvbuffer3_dc1394v1.cc
U libcvd/cvd_src/Linux/dvbuffer3_dc1394v2.cc
U libcvd/cvd_src/Linux/kernel-video1394.h
U libcvd/cvd_src/Linux/v4l1buffer.cc
U libcvd/cvd_src/Linux/v4l2buffer.cc
U libcvd/cvd_src/Linux/v4lbuffer.cc
U libcvd/cvd_src/Linux/v4lcontrol.cc
cvs checkout: Updating libcvd/cvd_src/OSX
U libcvd/cvd_src/OSX/qtbuffer.cpp
cvs checkout: Updating libcvd/cvd_src/SSE2
cvs checkout: Updating libcvd/cvd_src/Win32
U libcvd/cvd_src/Win32/glwindow.cpp
U libcvd/cvd_src/Win32/win32.cpp
U libcvd/cvd_src/Win32/win32.h
cvs checkout: Updating libcvd/cvd_src/fast
U libcvd/cvd_src/fast/fast_10_detect.cxx
U libcvd/cvd_src/fast/fast_10_score.cxx
U libcvd/cvd_src/fast/fast_11_detect.cxx
U libcvd/cvd_src/fast/fast_11_score.cxx
U libcvd/cvd_src/fast/fast_12_detect.cxx
U libcvd/cvd_src/fast/fast_12_score.cxx
U libcvd/cvd_src/fast/fast_7_detect.cxx
U libcvd/cvd_src/fast/fast_7_score.cxx
U libcvd/cvd_src/fast/fast_8_detect.cxx
U libcvd/cvd_src/fast/fast_8_score.cxx
U libcvd/cvd_src/fast/fast_9_detect.cxx
U libcvd/cvd_src/fast/fast_9_score.cxx
U libcvd/cvd_src/fast/prototypes.h
cvs checkout: Updating libcvd/cvd_src/i686
U libcvd/cvd_src/i686/byte_to_double_gradient.s
U libcvd/cvd_src/i686/byte_to_float_gradient.s
U libcvd/cvd_src/i686/byte_to_short_difference.s
U libcvd/cvd_src/i686/convert_rgb_to_y.cc
U libcvd/cvd_src/i686/convolve_float.s
U libcvd/cvd_src/i686/convolve_float4.s
U libcvd/cvd_src/i686/convolve_gaussian.cc
U libcvd/cvd_src/i686/float_add_mul_add.s
U libcvd/cvd_src/i686/float_add_mul_add_unaligned.s
U libcvd/cvd_src/i686/float_assign_mul.s
U libcvd/cvd_src/i686/float_difference.s
U libcvd/cvd_src/i686/float_innerproduct.s
U libcvd/cvd_src/i686/gradient.cc
U libcvd/cvd_src/i686/halfsample.s
U libcvd/cvd_src/i686/int_difference.s
U libcvd/cvd_src/i686/median_3x3.cc
U libcvd/cvd_src/i686/rgb_to_gray.s
U libcvd/cvd_src/i686/short_difference.s
U libcvd/cvd_src/i686/testconf
U libcvd/cvd_src/i686/utility_byte_differences.cc
U libcvd/cvd_src/i686/utility_double_int.cc
U libcvd/cvd_src/i686/utility_float.cc
U libcvd/cvd_src/i686/yuv411_to_stuff_MMX.C
U libcvd/cvd_src/i686/yuv411_to_stuff_MMX_64.C
U libcvd/cvd_src/i686/yuv420p_to_rgb.s
U libcvd/cvd_src/i686/yuv422_to_grey.s
U libcvd/cvd_src/i686/yuv422_to_rgb.s
U libcvd/cvd_src/i686/yuv422_wrapper.cc
cvs checkout: Updating libcvd/cvd_src/noarch
U libcvd/cvd_src/noarch/convert_rgb_to_y.cc
U libcvd/cvd_src/noarch/convolve_gaussian.cc
U libcvd/cvd_src/noarch/default_memalign.cpp
U libcvd/cvd_src/noarch/gradient.cc
U libcvd/cvd_src/noarch/median_3x3.cc
U libcvd/cvd_src/noarch/posix_memalign.cpp
U libcvd/cvd_src/noarch/utility_byte_differences.cc
U libcvd/cvd_src/noarch/utility_double_int.cc
U libcvd/cvd_src/noarch/utility_float.cc
U libcvd/cvd_src/noarch/yuv422_wrapper.cc
cvs checkout: Updating libcvd/cvd_src/nothread
U libcvd/cvd_src/nothread/runnable_batch.cc
cvs checkout: Updating libcvd/cvd_src/posix
cvs checkout: Updating libcvd/cvd_src/thread
U libcvd/cvd_src/thread/runnable_batch.cc
cvs checkout: Updating libcvd/doc
U libcvd/doc/cameracalib2cm.pdf
U libcvd/doc/tutorial.h
cvs checkout: Updating libcvd/make
U libcvd/make/compile_deps.awk
U libcvd/make/log_to_changelog.awk
U libcvd/make/march_flags
cvs checkout: Updating libcvd/pnm_src
U libcvd/pnm_src/bmp.cxx
U libcvd/pnm_src/fits.cc
U libcvd/pnm_src/jpeg.cxx
U libcvd/pnm_src/png.cc
U libcvd/pnm_src/pnm_grok.cxx
U libcvd/pnm_src/save_postscript.cxx
U libcvd/pnm_src/text.cxx
U libcvd/pnm_src/text_write.cc
U libcvd/pnm_src/tiff.cxx
U libcvd/pnm_src/tiffwrite.cc
cvs checkout: Updating libcvd/progs
U libcvd/progs/calibrate.cxx
U libcvd/progs/cvd_display_image.cxx
U libcvd/progs/cvd_image_viewer.cxx
U libcvd/progs/img_play.cxx
U libcvd/progs/img_play_bw.cxx
U libcvd/progs/img_play_deinterlace.cxx
U libcvd/progs/img_play_generic.cxx
U libcvd/progs/se3_exp.cxx
U libcvd/progs/se3_inv.cxx
U libcvd/progs/se3_ln.cxx
U libcvd/progs/se3_post_mul.cxx
U libcvd/progs/se3_pre_mul.cxx
U libcvd/progs/video_play.cc
U libcvd/progs/video_play_bw.cc
U libcvd/progs/video_play_source.cc
cvs checkout: Updating libcvd/python
U libcvd/python/setup.py
cvs checkout: Updating libcvd/python/CVD
U libcvd/python/CVD/cvd.cpp
cvs checkout: Updating libcvd/test
U libcvd/test/diskbuffer2.cxx
U libcvd/test/dvbuffer3_bayerrgb.cxx
U libcvd/test/dvbuffer3_mono.cxx
U libcvd/test/dvbuffer_controls.cxx
U libcvd/test/dvbuffer_mono.cxx
U libcvd/test/dvbuffer_rgb.cxx
U libcvd/test/dvbuffer_yuvrgb.cxx
U libcvd/test/fast_test.cxx
U libcvd/test/floodfill_test.cc
U libcvd/test/font.cpp
U libcvd/test/o2buffer.cxx
U libcvd/test/test_images.cxx
U libcvd/test/v4l1buffer_bayer.cxx
U libcvd/test/v4l1buffer_mono.cxx
U libcvd/test/v4l1buffer_rgb.cxx
U libcvd/test/v4l2buffer.cxx
U libcvd/test/v4lbuffer_bayerrgb.cxx
U libcvd/test/v4lbuffer_mono.cxx
U libcvd/test/videoprog.cxx
cvs checkout: Updating libcvd/test/fast_test_image
U libcvd/test/fast_test_image/noise.pgm
cvs checkout: Updating libcvd/test/images
U libcvd/test/images/1-byte-bin.pgm
U libcvd/test/images/1-byte-bin.ppm
U libcvd/test/images/1-byte-txt.pgm
U libcvd/test/images/1-byte-txt.ppm
U libcvd/test/images/2-byte-bin.pgm
U libcvd/test/images/2-byte-bin.ppm
U libcvd/test/images/2-byte-txt.pgm
U libcvd/test/images/2-byte-txt.ppm
U libcvd/test/images/colour.jpg
U libcvd/test/images/grey.jpg
cvs checkout: Updating libcvd/test/images/tiff
U libcvd/test/images/tiff/grey-bool-inverted.tiff
U libcvd/test/images/tiff/grey-uint16-normal.tiff
U libcvd/test/images/tiff/grey-uint8-normal.tiff
U libcvd/test/images/tiff/rgb-uint16.tiff
U libcvd/test/images/tiff/rgb-uint8.tiff
cvs checkout: Updating libcvd/util
%% cvs -z3 -d:pserver:anonymous@cvs.savannah.nongnu.org:/sources/libcvd co -D "Mon May 11 16:29:26 BST 2009" gvars3
실행 결과:
cvs checkout: warning: failed to open /Users/lym/.cvspass for reading: No such file or directory
cvs checkout: Updating gvars3
U gvars3/Authors
U gvars3/GVars2.h.historic
U gvars3/LICENSE
U gvars3/Makefile.in
U gvars3/config.guess
U gvars3/config.sub
U gvars3/configure
U gvars3/configure.ac
U gvars3/fltk2_test
U gvars3/fltk_test
U gvars3/install-sh
U gvars3/main.cc
cvs checkout: Updating gvars3/build
cvs checkout: Updating gvars3/build/vc2005
U gvars3/build/vc2005/gvars3-headless.vcproj
U gvars3/build/vc2005/gvars3.sln
U gvars3/build/vc2005/gvars3.vcproj
cvs checkout: Updating gvars3/build/vc2008
U gvars3/build/vc2008/gvars3-headless.vcproj
U gvars3/build/vc2008/gvars3.sln
U gvars3/build/vc2008/gvars3.vcproj
cvs checkout: Updating gvars3/gvars2_compat
cvs checkout: Updating gvars3/gvars3
U gvars3/gvars3/GStringUtil.h
U gvars3/gvars3/GUI.h
U gvars3/gvars3/GUI_Fltk.h
U gvars3/gvars3/GUI_Fltk2.h
U gvars3/gvars3/GUI_Motif.h
U gvars3/gvars3/GUI_Widgets.h
U gvars3/gvars3/GUI_non_readline.h
U gvars3/gvars3/GUI_readline.h
U gvars3/gvars3/config.h.in
U gvars3/gvars3/default.h
U gvars3/gvars3/gv3_implementation.hh
U gvars3/gvars3/gvars3.h
U gvars3/gvars3/instances.h
U gvars3/gvars3/serialize.h
U gvars3/gvars3/type_name.h
cvs checkout: Updating gvars3/src
U gvars3/src/GStringUtil.cc
U gvars3/src/GUI.cc
U gvars3/src/GUI_Fltk.cc
U gvars3/src/GUI_Fltk2.cc
U gvars3/src/GUI_Motif.cc
U gvars3/src/GUI_impl.h
U gvars3/src/GUI_impl_headless.cc
U gvars3/src/GUI_impl_noreadline.cc
U gvars3/src/GUI_impl_readline.cc
U gvars3/src/GUI_language.cc
U gvars3/src/GUI_non_readline.cc
U gvars3/src/GUI_none.cc
U gvars3/src/GUI_readline.cc
U gvars3/src/gvars2.cc
U gvars3/src/gvars3.cc
U gvars3/src/inst.cc
U gvars3/src/inst_headless.cc
U gvars3/src/serialize.cc
checking for g++... g++
checking for C++ compiler default output file name... a.out
checking whether the C++ compiler works... yes
checking whether we are cross compiling... no
checking for suffix of executables...
checking for suffix of object files... o
checking whether we are using the GNU C++ compiler... yes
checking whether g++ accepts -g... yes
checking for decltype... no
checking for typeof... yes
You're on the development branch of TooN 2.0. Everything will probably work, but
the interface is a bit different from TooN-1.x
If you want TooN-1, then get it using:
cvs -z3 -d:pserver:anoncvs@cvs.savannah.nongnu.org:/cvsroot/toon co -r Maintenance_Branch_1_x TooN
or update what you currently have using:
cvs up -r Maintenance_Branch_1_x
or head over to:
http://mi.eng.cam.ac.uk/~er258/cvd/
Otherwise, please report any bugs you come across.
checking for gcc... gcc
checking for C compiler default output file name... a.out
checking whether the C compiler works... yes
checking whether we are cross compiling... no
checking for suffix of executables...
checking for suffix of object files... o
checking whether we are using the GNU C compiler... yes
checking whether gcc accepts -g... yes
checking for gcc option to accept ISO C89... none needed
checking how to run the C preprocessor... gcc -E
checking for grep that handles long lines and -e... /usr/bin/grep
checking for egrep... /usr/bin/grep -E
checking for ANSI C header files... yes
checking for gawk... no
checking for mawk... no
checking for nawk... no
checking for awk... awk
checking for g++... g++
checking whether we are using the GNU C++ compiler... yes
checking whether g++ accepts -g... yes
checking for a BSD-compatible install... /usr/bin/install -c
checking whether ln -s works... yes
checking for ranlib... ranlib
checking how to run the C++ preprocessor... g++ -E
checking if compiler flag -Wall works... yes
checking if compiler flag -Wextra works... yes
checking if compiler flag -pipe works... yes
checking if compiler flag -ggdb works... yes
checking if compiler flag -fPIC works... yes
checking build system type... i386-apple-darwin9.7.0
checking host system type... i386-apple-darwin9.7.0
checking for best optimize flags...
checking if compiler flag -O3 works... yes
checking CPU type... unknown
------------------------------------
Checking processor specific features
------------------------------------
checking for sys/types.h... yes
checking for sys/stat.h... yes
checking for stdlib.h... yes
checking for string.h... yes
checking for memory.h... yes
checking for strings.h... yes
checking for inttypes.h... yes
checking for stdint.h... yes
checking for unistd.h... yes
checking whether byte ordering is bigendian... no
checking for MMX support... yes
checking for MMXEXT support... yes
checking for SSE support... yes
checking for SSE2 support... yes
checking for SSE3 support... yes
checking for void*... yes
checking size of void*... 4
checking for inline asm statement... yes
checking assembler supports .type pseudo-op... no
-----------------------------------------------
Checking for operating system specific features
-----------------------------------------------
checking dc1394/dc1394.h usability... no
checking dc1394/dc1394.h presence... no
checking for dc1394/dc1394.h... no
checking for main in -ldc1394... no
checking for /opt/local... yes
checking for /sw... no
configure: Adding /usr/X11R6/include to the build path.
checking Carbon and QuickTime framework... yes
-------------------------------
Checking for optional libraries
-------------------------------
checking for X... libraries /usr/X11/lib, headers /usr/X11/include
checking for glDrawPixels in -lGL... yes
checking GL/glu.h usability... yes
checking GL/glu.h presence... yes
checking for GL/glu.h... yes
checking for gluGetString in -lGLU... yes
checking for tr1::shared_ptr... yes
checking for TooN... yes
checking Old TooN... no
checking for dgesvd_ in -lacml... no
checking if Accelerate framework is needed for LAPACK...
checking for dgesvd_... yes
checking for working pthreads... yes
checking for pthread_yield... no
checking for pthread_yield_np... yes
checking png.h usability... yes
checking png.h presence... yes
checking for png.h... yes
checking for png_init_io in -lpng... yes
checking jpeglib.h usability... yes
checking jpeglib.h presence... yes
checking for jpeglib.h... yes
checking for jpeg_destroy_decompress in -ljpeg... yes
checking JPEG read buffer size... 1 (safe reading)
checking tiffio.h usability... yes
checking tiffio.h presence... yes
checking for tiffio.h... yes
checking for TIFFReadRGBAImage in -ltiff... yes
checking for TIFFReadRGBAImageOriented in -ltiff... yes
checking for doxygen... no
-----------------------------------
Checking for platform compatibility
-----------------------------------
checking glob.h usability... yes
checking glob.h presence... yes
checking for glob.h... yes
checking for glob... yes
checking for GLOB_BRACE and GLOB_TILDE in glob.h... yes
checking whether feenableexcept is declared... no
checking for posix_memalign... no
--------------------------------
Checking for extra build options
--------------------------------
checking for gawk... no
checking for mawk... no
checking for nawk... no
checking for awk... awk
checking for g++... g++
checking for C++ compiler default output file name... a.out
checking whether the C++ compiler works... yes
checking whether we are cross compiling... no
checking for suffix of executables...
checking for suffix of object files... o
checking whether we are using the GNU C++ compiler... yes
checking whether g++ accepts -g... yes
checking how to run the C++ preprocessor... g++ -E
checking for grep that handles long lines and -e... /usr/bin/grep
checking for egrep... /usr/bin/grep -E
checking for ANSI C header files... yes
checking for sys/types.h... yes
checking for sys/stat.h... yes
checking for stdlib.h... yes
checking for string.h... yes
checking for memory.h... yes
checking for strings.h... yes
checking for inttypes.h... yes
checking for stdint.h... yes
checking for unistd.h... yes
checking iostream usability... yes
checking iostream presence... yes
checking for iostream... yes
checking build system type... i386-apple-darwin9.7.0
checking host system type... i386-apple-darwin9.7.0
configure: Adding /sw to the build path.
configure: Adding /opt/local to the build path.
checking if compiler flag -Wall works... yes
checking if compiler flag -Wextra works... yes
--------------------------
Checking for options
--------------------------
checking for TooN... yes
checking for TooN-2... yes
checking if compiler flag -pthread works... yes
checking for rl_done in -lreadline... yes
------------------------------------------------
Checking for widget libraries (provides GUI_...)
------------------------------------------------
configure: WARNING: No GUI functionality enabled
Options:
toon readline
내 (OS X의) 경우, PTAM/Build/OS X에 있는 모든 (두 개의) 파일 Makefile과 VideoSource_OSX.cc를 PTAM 폴더에 옮겼다.
3-2. video source 셋업
카메라에 맞는 video input file을 컴파일하도록 Makefile을 수정해 주어야 한다.
맥의 경우, (아마도 Logitech Quickcam Pro 5000 을 기준으로 하는) 하나의 소스 파일만이 존재하므로 그대로 두면 될 듯.
3-3. video source 추가
다른 비디오 소스들은 libCVD에 클래스로 만들어져 있다고 한다. 여기에 포함되어 있지 않은 경우에는 VideoSource_XYZ.cc 라는 식의 이름을 갖는 파일을 만들어서 넣어 주어야 한다.
3-4. compile
PTAM 폴더에 들어가서
%% make
실행 결과:
g++ -g -O3 main.cc -o main.o -c -I /MY_CUSTOM_INCLUDE_PATH/ -D_OSX -D_REENTRANT
g++ -g -O3 VideoSource_OSX.cc -o VideoSource_OSX.o -c -I /MY_CUSTOM_INCLUDE_PATH/ -D_OSX -D_REENTRANT
g++ -g -O3 GLWindow2.cc -o GLWindow2.o -c -I /MY_CUSTOM_INCLUDE_PATH/ -D_OSX -D_REENTRANT
In file included from OpenGL.h:20,
from GLWindow2.cc:1:
/usr/local/include/cvd/gl_helpers.h:38:19: error: GL/gl.h: No such file or directory
/usr/local/include/cvd/gl_helpers.h:39:20: error: GL/glu.h: No such file or directory
/usr/local/include/cvd/gl_helpers.h: In function 'void CVD::glPrintErrors()':
/usr/local/include/cvd/gl_helpers.h:569: error: 'gluGetString' was not declared in this scope
make: *** [GLWindow2.o] Error 1
PTAM이 OpenGL을 사용하고 있는데, OpenGL이 Mac에 기본으로 설치되어 있으므로 신경쓰지 않았던 부분이다. 물론 system의 public framework으로 들어가 있음을 확인할 수 있다. 그런데 UNIX 프로그램에서 접근할 수는 없는가? (인터넷에서 검색해 보아도 따로 설치할 수 있는 다운로드 링크나 방법을 찾을 수 없다.)
에러 메시지에 대한 정확한 진단 ->
philphys: 일단 OpenGL은 분명히 있을 건데 그 헤더파일과 라이브러리가 있는 곳을 지정해 주지 않아서 에러가 나는 것 같아. 보통 Makefile에 이게 지정되어 있어야 하는데 실행결과를 보니까 전혀 지정되어 있지 않네. 중간에 보면 -I /MY_CUSTOM_INCLUDE_PATH/ 라는 부분이 헤더 파일의 위치를 지정해 주는 부분이고 또 라이브러리는 뒤에 링크할 때 지정해 주게 되어 있는데 거기까지는 가지도 못 했네.
즉, "링커가 문제가 아니라, 컴파일러 옵션에 OpenGL의 헤더파일이 있는 디렉토리를 지정해 주어야 할 것 같다"고 한다.
문제의 Makefile을 들여다보고
# DO NOT DELETE THIS LINE -- make depend depends on it.
# Edit the lines below to point to any needed include and link paths
# Or to change the compiler's optimization flags CC = g++ -g -O3 COMPILEFLAGS = -I /MY_CUSTOM_INCLUDE_PATH/ -D_OSX -D_REENTRANT LINKFLAGS = -framework OpenGL -framework VecLib -L/MY_CUSTOM_LINK_PATH/ -lGVars3 -lcvd
(다음은 philphys 인용) 파란색 부분 - 각 소스코드를 컴파일한 다음 컴파일된 오브젝트 코드를 실행파일로 링크하는 부분. 여기서는 $(LINKFLAGS)에 링커 프로그램에 전달되는 옵션이 들어간다. 초록색 부분 - 컴파일할 오브젝트 코드의 리스트 분홍색 부분 - CC는 컴파일러 프로그램과 기본 옵션. COMPILEFLAGS는 컴파일러에 전달하는 옵션들, 여기에 헤더 파일의 위치를 정할 수 있다. LINKFLAGS는 컴파일된 오브젝트 코드를 실행파일로 링크하는 링커에 들어가는 옵션. 여기에 라이브러리의 위치와 사용할 라이브러리를 지정해 준다. 라이브러리의 위치는 -L 옵션으로, 구체적인 라이브러리 이름은 -l 옵션으로.
maetel: 사실 프레임웍 안에 gl.h 파일이 있는 위치는 다음과 같다.
/System/Library/Frameworks/OpenGL.framework/Versions/A/Headers
philphys: "근데 코드에서는 그 헤더를 "GL/gl.h"로 찾는다는 게 문제. 이건 프레임웍 방식이 아닌 고전적인 유닉스 Xwindows의 OpenGL 방식이다. 즉 방금 보인 gl.h, glu.h 등이 있는 /usr/X11R6/include 를 COMPILERFLAGS에 -I 옵션으로 넣어 줘야 하는 게 아닐까."
philphys: /usr/X11R6/include 밑에 GL 폴더가 있고 거기에 필요한 헤더파일들이 모두 들어 있다. 그래서 코드에선 "GL/gl.h" 하는 식으로 explicit하게 GL 폴더를 찾게 된다.
그러고 보면 아래와 같은 설명이 있었던 것이다.
Since the Linux code compiles directly against the nVidia driver's GL headers, use of a different GL driver may require some modifications to the code.
CameraCalibrator 파일을 실행시켜 카메라 캘리브레이션을 시도했더니 GUI 창이 뜨는데 연결된 웹캠(Logitech QuickCam Pro 4000)으로부터 입력을 받지 못 한다.
4-0. 증상
CameraCalibrator 실행파일을 열면, 다음과 같은 터미널 창이 새로 열린다.
Last login: Fri Aug 7 01:14:05 on ttys001
%% /Users/lym/PTAM/CameraCalibrator ; exit;
Welcome to CameraCalibrator
--------------------------------------
Parallel tracking and mapping for Small AR workspaces
Copyright (C) Isis Innovation Limited 2008
Parsing calibrator_settings.cfg ....
! GUI_impl::Loadfile: Failed to load script file "calibrator_settings.cfg".
VideoSource_OSX: Creating QTBuffer....
IMPORTANT
This will open a quicktime settings planel.
You should use this settings dialog to turn the camera's
sharpness to a minimum, or at least so small that no sharpening
artefacts appear! In-camera sharpening will seriously degrade the
performance of both the camera calibrator and the tracking system.
>
그리고 Video란 이름의 GUI 창이 열리는데, 이때 아무런 설정을 바꾸지 않고 그대로 OK를 누르면 위의 터미널 창에 다음과 같은 메시지가 이어지면서 자동 종료된다.
.. created QTBuffer of size [640 480]
2009-08-07 01:20:57.231 CameraCalibrator[40836:10b] ***_NSAutoreleaseNoPool(): Object 0xf70e2c0 of class NSThread autoreleasedwith no pool in place - just leaking
Stack: (0x96827f0f 0x96734442 0x9673a1b4 0xbc2db7 0xbc7e9a 0xbc69d30xbcacbd 0xbca130 0x964879c9 0x90f8dfb8 0x90e69618 0x90e699840x964879c9 0x90f9037c 0x90e7249c 0x90e69984 0x964879c9 0x90f8ec800x90e55e05 0x90e5acd5 0x90e5530f 0x964879c9 0x94179eb9 0x282b48 0xd9f40xd6a6 0x2f16b 0x2fea4 0x26b6)
! Code for converting from format "Raw RGB data"
not implemented yet, check VideoSource_OSX.cc.
logout
[Process completed]
그러므로 3-3의 문제 -- set up video source (비디오 소스 셋업) --로 돌아가야 한다.
즉, VideoSource_OSX.cc 파일을 수정해서 다시 컴파일한 후 실행해야 한다.
Other video source classes are available with libCVD. Finally, if a custom video source not supported by libCVD is required, the code for it will have to be put into some VideoSource_XYZ.cc file (the interface for this file is very simple.)
삽질...
터미널에서 calibrator_settings.cfg 파일을 로드하지 못 했다고 하기에, 그 파일을 찾아보았다.
%% find . -name "calibrator_settings.cfg" -print
./calibrator_settings.cfg
알고 보니 ./는 현재 디렉토리를 말하나 보다. PTAM 폴더 밑에 바로 있다. 왜 못 봤을까...
열어 보니 다음과 같다.
// This file is parsed by the CameraCalibrator executable
// Put any custom gvars settings you want in here
// For example: to increase the camera calibrator's blur parameter,
// uncomment the following line
// CameraCalibrator.BlurSigma=2.0
VideoSource::VideoSource()
{
cout << " VideoSource_OSX: Creating QTBuffer...." << endl;
cout << " IMPORTANT " << endl;
cout << " This will open a quicktime settings planel. " << endl
<< " You should use this settings dialog to turn the camera's " << endl
<< " sharpness to a minimum, or at least so small that no sharpening " << endl
<< " artefacts appear! In-camera sharpening will seriously degrade the " << endl
<< " performance of both the camera calibrator and the tracking system. " << endl;
QTBuffer<yuv422>* pvb;
try
{
pvb= new QTBuffer<yuv422>(ImageRef(640,480), 0, true);
}
catch (CVD::Exceptions::All a)
{
cerr << " Error creating QTBuffer; expection: " << a.what << endl;
exit(1);
}
mptr = pvb;
mirSize = pvb->size();
cout << " .. created QTBuffer of size " << mirSize << endl;
};
그러나 위에서 보듯 size가 맞지 않고 frame이 겹치는 등 넘어갈 수 없는 문제가 있다. (오른쪽 이미지는 같은 상황에서의 비교를 위해 맥용 드라이버 macam에서의 입력을 캡쳐한 것.)
터미널에서의 결과:
%% /Users/lym/PTAM/CameraCalibrator ; exit;
Welcome to CameraCalibrator
--------------------------------------
Parallel tracking and mapping for Small AR workspaces
Copyright (C) Isis Innovation Limited 2008
Parsing calibrator_settings.cfg ....
! GUI_impl::Loadfile: Failed to load script file "calibrator_settings.cfg".
VideoSource_OSX: Creating QTBuffer....
IMPORTANT
This will open a quicktime settings planel.
You should use this settings dialog to turn the camera's
sharpness to a minimum, or at least so small that no sharpening
artefacts appear! In-camera sharpening will seriously degrade the
performance of both the camera calibrator and the tracking system.
> .. created QTBuffer of size [640 480]
2009-08-12 23:10:38.309 CameraCalibrator[5110:10b] *** _NSAutoreleaseNoPool(): Object 0xf8054e0 of class NSThread autoreleased with no pool in place - just leaking
Stack: (0x96670f4f 0x9657d432 0x965831a4 0xc17db7 0xc1ce9a 0xc1b9d3 0xc1fcbd 0xc1f130 0x924b09c9 0x958e8fb8 0x957c4618 0x957c4984 0x924b09c9 0x958eb37c 0x957cd49c 0x957c4984 0x924b09c9 0x958e9c80 0x957b0e05 0x957b5cd5 0x957b030f 0x924b09c9 0x90bd4eb9 0x282b48 0xd9e4 0xd5a6 0x2f15b 0x2fe94 0x25b6)
4-1-2. YUV format 확인
Logitech QuickCam Pro 4000는 YUV420P라는 글을 어디선가 보고, 코드의 yuv422 부분을 yuv420p로 바꾸었으나 증상은 그대로이다.
skype forum:
There is another problem here with Xgl unfortunately, as it
isn'tsupporting the YUV420P (I420) overlay colour/pixel format either.
Soeven if the camera captures successfully (which looks okay on
thosesettings), then you still won't see anything.
왼쪽: macam에서 캡쳐한 이미지 / 오른쪽: PTAM CameraCalibrator에서 보여지는 이미지
Logitech QuickCam Pro 4000
Welcome to CameraCalibrator
--------------------------------------
Parallel tracking and mapping for Small AR workspaces
Copyright (C) Isis Innovation Limited 2008
Parsing calibrator_settings.cfg ....
VideoSource_OSX: Creating QTBuffer....
IMPORTANT
This will open a quicktime settings planel.
You should use this settings dialog to turn the camera's
sharpness to a minimum, or at least so small that no sharpening
artefacts appear! In-camera sharpening will seriously degrade the
performance of both the camera calibrator and the tracking system.
> .. created QTBuffer of size [640 480]
2009-08-13 04:02:50.464 CameraCalibrator[6251:10b] ***
_NSAutoreleaseNoPool(): Object 0x9df180 of class NSThread autoreleased
with no pool in place - just leaking
Stack: (0x96670f4f 0x9657d432 0x965831a4 0xbc2db7 0xbc7e9a 0xbc69d3
0xbcacbd 0xbca130 0x924b09c9 0x958e8fb8 0x957c4618 0x957c4984
0x924b09c9 0x958eb37c 0x957cd49c 0x957c4984 0x924b09c9 0x958e9c80
0x957b0e05 0x957b5cd5 0x957b030f 0x924b09c9 0x90bd4eb9 0x282b48 0xd414
0xcfd6 0x2f06b 0x2fda4)
4-2. Camera Calibrator 실행
Camera calib is [ 1.51994 2.03006 0.499577 0.536311 -0.0005 ]
Saving camera calib to camera.cfg...
.. saved.
5. PTAM 실행
Welcome to PTAM
---------------
Parallel tracking and mapping for Small AR workspaces
Copyright (C) Isis Innovation Limited 2008
Parsing settings.cfg ....
VideoSource_OSX: Creating QTBuffer....
IMPORTANT
This will open a quicktime settings planel.
You should use this settings dialog to turn the camera's
sharpness to a minimum, or at least so small that no sharpening
artefacts appear! In-camera sharpening will seriously degrade the
performance of both the camera calibrator and the tracking system.
> .. created QTBuffer of size [640 480]
2009-08-13 20:17:54.162 ptam[1374:10b] *** _NSAutoreleaseNoPool(): Object 0x8f5850 of class NSThread autoreleased with no pool in place - just leaking
Stack: (0x96670f4f 0x9657d432 0x965831a4 0xbb9db7 0xbbee9a 0xbbd9d3 0xbc1cbd 0xbc1130 0x924b09c9 0x958e8fb8 0x957c4618 0x957c4984 0x924b09c9 0x958eb37c 0x957cd49c 0x957c4984 0x924b09c9 0x958e9c80 0x957b0e05 0x957b5cd5 0x957b030f 0x924b09c9 0x90bd4eb9 0x282b48 0x6504 0x60a6 0x11af2 0x28da 0x2766)
ARDriver: Creating FBO... .. created FBO.
MapMaker: made initial map with 135 points.
MapMaker: made initial map with 227 points.
CameraCalibrator를 실행하면 뜨는 GUI 창에서 다음과 같이 기본 설정이 적용되고,
Source: iSight
Compression type: Component Video - CCIR-601 uyvy
rms error 0.3 이하로 깔끔하게 수렴된 카메라 파라미터의 계산값이 다음과 같은 식으로 나올 때,
Camera calib is [ 1.22033 1.62577 0.489375 0.641251 0.544352 ]
PTAM을 실행하면 위의 Logitech QuickCam 두 기종보다는 features를 보다 잘 잡는다. (아직은 많이 부족하지만...)
Welcome to PTAM
---------------
Parallel tracking and mapping for Small AR workspaces
Copyright (C) Isis Innovation Limited 2008
Parsing settings.cfg ....
VideoSource_OSX: Creating QTBuffer....
IMPORTANT
This will open a quicktime settings planel.
You should use this settings dialog to turn the camera's
sharpness to a minimum, or at least so small that no sharpening
artefacts appear! In-camera sharpening will seriously degrade the
performance of both the camera calibrator and the tracking system.
> .. created QTBuffer of size [640 480]
ARDriver: Creating FBO... .. created FBO.
MapMaker: made initial map with 242 points.
MapMaker: made initial map with 259 points.
MapMaker: made initial map with 323 points.
MapMaker: made initial map with 626 points.
Klein, G. and Murray, D. 2007. Parallel Tracking and Mapping for Small AR Workspaces
In Proceedings of the 2007 6th IEEE and ACM international Symposium on Mixed and Augmented Reality - Volume 00
(November 13 - 16, 2007). Symposium on Mixed and Augmented Reality.
IEEE Computer Society, Washington, DC, 1-10. DOI=
http://dx.doi.org/10.1109/ISMAR.2007.4538852
1. parallel threads of tracking and mapping
2. mapping from smaller keyframes: batch techniques (Bundle Adjustment)
3. Initializing the map from 5-point Algorithm
4. Initializing new points with epipolar search
5. mapping thousands of points
affine warp
warping matrix <- (1) back-projecting unit pixel displacements in the source keyframe pyramid level onto the patch's plane and then (2) projecting these into the current (target) frame
- 음악 프로그래밍 언어 (cp. CSound, Max/MSP, PD) - SmallTalk에 기반, James McCartney 개발 - 활용: Calculator, Sound Synthesis & Analysis, DSP(Effector), Algorithmic Composition, ... - 특장점: - object-oriented style - real-time interpreter - 하나의 package 안에서 GUI를 활용한 real-time 제어 - on-the-fly 프로그래밍 - OSC (Open Sound Control) protocol 지원 - 낮은 CPU 점유율
Computer Music
with examples in
SuperCollider 3
David Michael Cottle
3. Post Window & Basic Key command - Post Window: booting 과정에서 로딩되는 라이브러리의 상태를 보여 주며, interpreter의 메시지, 프로그래밍의 에러 등을 보여 준다. - key command enter (return 아님): run command + . : stop playing command + D : help
4. Basic Syntax colons: keyword arguments semi-colons: statement의 끝 commas: list에서 item을 분리할 때 사용 periods: 메시지를 처리할 때 사용
- delimiters: parenthes () : argument list를 전달하거나 연산처리에서 사용 curly brackets {} : function을 정의할 때 사용
5. Basic Synthesis
// week 1
246*456
"hello".speak
rrand(64,127)
3.rand
{SinOsc.ar(440,0,0,1)}.play;
{SinOsc.ar(440,0,0,1)}.scope;
SinOsc.ar(440,0,0,1).play;
{SinOsc.ar(440,0,0,1}.play;
// 5. Basic Synthesis
{SinOsc.ar(440,0,0,1)}.play
(// double click on the inside of any bracket to highlight the code contained within )
(// select this code within the outer parentheses // then press the ENTER key on the numberic keypad {SinOsc.ar(440,0,0,1) + Pulse.ar(443,0,6,0,0.05) }.play )
http://ref.daum.net/item/928715 국제통신컨퍼런스99: A Multi-Resolution Video Scheme for Multimedia Information Servers in Mobile Computing Environment
A nonlinear interpolation scheme for still color image resolution
enhancement introduced. It is based on the use of a Self-Creating and
Organizing Neural Network, which extracts feature of local pixel
distribution and presents optimal interpolation coefficient.
Interpolation order is restricted to one and proposed algorithm is
compared to one linear and two nonlinear first order interpolation
algorithms. Experimental results indicated that proposed algorithm
produce better quantitative results than other techniques.
ref. Steve Oualline, Practical C Programmin, 292-293p
root node leaves
"Recursion is extremely useful with trees. Our rules for recursion are: 1. The function must make things simpler. This rule is satisfied by trees, because as you descend the hierarchy there is less to search. 2. There must be some endpoint. A tree offers two endpoints, either you find a match, or you reach a null node.
Willian T. Reeves <Particle Systems—a Technique for Modeling a Class of Fuzzy Objects>, ACM Transactions on Graphics, Vol.2, no.2, April 1983, Page 91-108
The model definition is procedural and is controlled by random numbers.
efficiency of human design time (to obtain a highly detailed model)
ability to adjust the level of detail (to suit a specific set of viewing parameters)
fractal surfaces
It is easier to model "alive" objects changing form over a period of time.
keywords: image synthesis stochastic process Stochastics fractal surfaces procedure random numbers stochastic modeling fractal modeling
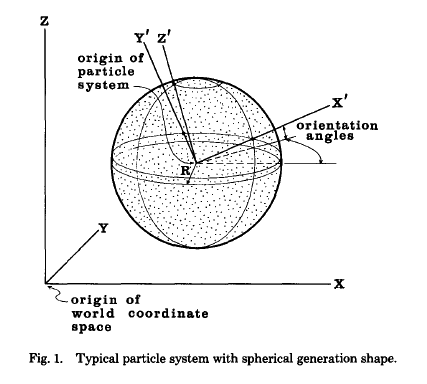
2. BASIC MODEL OF PARTICLE SYSTEMS
A particle system is a collection of many minute particles that together represent a fuzzy object. Over a period of time, particles are generated into a system, move and change from within the system, and die from the system.
initial position => the origin of a particle system initial velocity initial color <= average RGB values and the maximum deviation from them initial transparency initial size shape => a region of newly born random particles about its origin lifetime
A particle's initial color, transparency and size are determined by mean values like MeasSpeed, maximum variations like VarSpeed of below:
InitialSpeed = MeanSpeed + Rand()*VarSpeed
More complicated generation shapes based on the law of nature or on chaotic attractors have been envisioned. eg. streaked spherical shapes => motion-blur particles
2.3 Particle Dynamics 2.4 Particle Extinction
when a particle's lifetime reaches zero
when the intensity of a particle, calculated from its color and transparency, drops belowa specified threshold
when a particle moves more than a given distance in a given direction from the origin of its parent particle system
2.5 Particle Rendering (1) Explosions and fire, the two fuzzy objects we have worekd with the most, are modeled well with the assumption that each particle can be displayed as a point light source. (Other fuzzy objects, such as clouds and water, are not.) (2) Since particles do not reflect but emit light, shadows are no longer a problem. 2.6 Particle Hierarchy
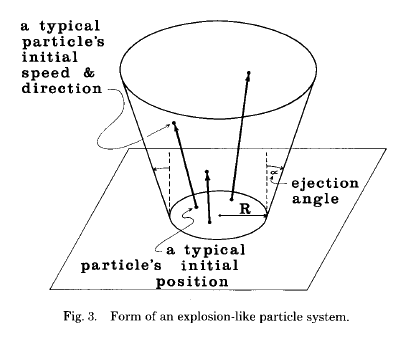
The initial direction of the particles' movement was constrained by the
system's ejection angle to fall within the region bounded by the
inverted cone. As particles flew upward, the gravity parameter pulled them back down to the planet's surface, giving them a parabolic motion path. The number of particles generated per frame was based on the amount of screen area covered by the particle system. Varying the mean velocity parameter caused the explosions to be of different heights. The rate at which a particle's color changed simulated the cooling of a glowing piece of some hypothetical material.
When a motion picture camera is used to film live action at 24 frames per second, the camera shutter typically remains open for 1/50 of a second. The image captured on a frame is actually an integration of approximately half the motion that occurred between successive frames. An object moving quickly appears blurred in the individual still frames.
> Ideas of modeling objects as collections of particles Evans & Sutherland @http://www.es.com Roger Wilson at Ohio State Alvy Ray Smith and Jim Blinn, Cosmos series Alan Norton Jim Blinn, light reflection functions
> Ideas of volumetric representations Norm Badler and Joe O'Rourke, solid modeling, "bubbleman"
“A particle system is a collection of many many minute particles that together represent a fuzzy object. Over a period of time, particles are generated into a system, move and change from within the system, and die from the system.”
Alain Fournier (University of Toronto) & Don Fussell (The University of Texas at Austin)
& Loren Carpenter (Lucasfilm) <Computer Rendering of Stochastic Models>

 smSeitz_2006cvpr.pdf
smSeitz_2006cvpr.pdf







 VideoSource_OSX.cc
VideoSource_OSX.cc